11: 边缘检测
学习使用 Canny 获取图像的边缘。图片等可到文末引用处下载。
目标
- Canny 边缘检测的简单概念
- OpenCV 函数:
cv2.Canny()
教程
Canny 边缘检测方法常被誉为边缘检测的最优方法,废话不多说,先看个例子:
import cv2
import numpy as np
img = cv2.imread('handwriting.jpg', 0)
edges = cv2.Canny(img, 30, 70) # canny 边缘检测
cv2.imshow('canny', np.hstack((img, edges)))
cv2.waitKey(0)
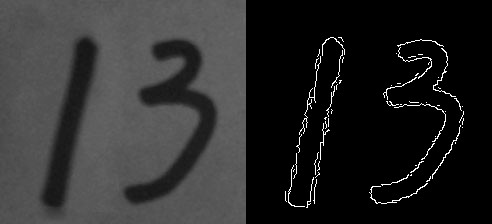
cv2.Canny()进行边缘检测,参数 2、3 表示最低、高阈值,下面来解释下具体原理。
提示
之前我们用低通滤波的方式模糊了图片,那反过来,想得到物体的边缘,就需要用到高通滤波。推荐先阅读:番外篇:图像梯度。
Canny 边缘检测
Canny 边缘提取的具体步骤如下:
1,使用 5×5 高斯滤波消除噪声:
边缘检测本身属于锐化操作,对噪点比较敏感,所以需要进行平滑处理。高斯滤波的具体内容参考前一篇:平滑图像
2,计算图像梯度的方向:
首先使用 Sobel 算子计算两个方向上的梯度和,然后算出梯度的方向:
保留这四个方向的梯度:0°/45°/90°/135°,有什么用呢?我们接着看。
3,取局部极大值:
梯度其实已经表示了轮廓,但为了进一步筛选,可以在上面的四个角度方向上再取局部极大值:
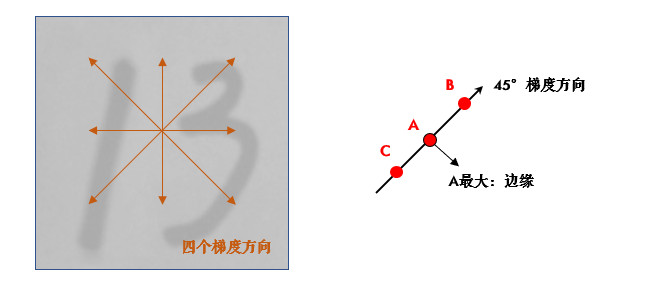
比如,A 点在 45° 方向上大于 B/C 点,那就保留它,把 B/C 设置为 0。
4,滞后阈值:
经过前面三步,就只剩下 0 和可能的边缘梯度值了,为了最终确定下来,需要设定高低阈值:
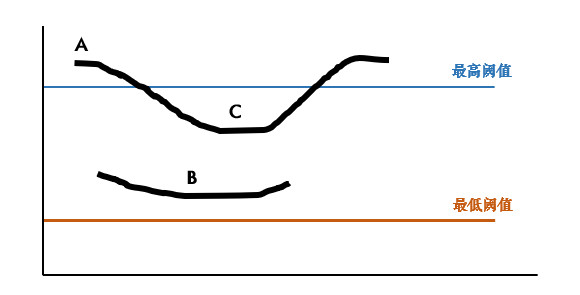
- 像素点的值大于最高阈值,那肯定是边缘(上图 A)
- 同理像素值小于最低阈值,那肯定不是边缘
- 像素值介于两者之间,如果与高于最高阈值的点连接,也算边缘,所以上图中 C 算,B 不算
Canny 推荐的高低阈值比在 2:1 到 3:1 之间。
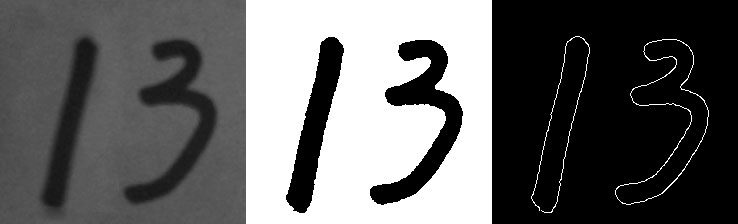
先阈值分割后检测
其实很多情况下,阈值分割后再检测边缘,效果会更好:
_, thresh = cv2.threshold(img, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
edges = cv2.Canny(thresh, 30, 70)
cv2.imshow('canny', np.hstack((img, thresh, edges)))
cv2.waitKey(0)
代码中我用了番外篇:Otsu 阈值法中的自动阈值分割,如果你不太了解,大可以使用传统的方法,不过如果是下面这种图片,推荐用 Otsu 阈值法。另外 Python 中某个值不用的话,就写个下划线'_'。
练习
- (选做)如果你不太理解高低阈值的效果,创建两个滑动条来调节它们的值看看:
小结
- Canny 是用的最多的边缘检测算法,用
cv2.Canny()实现。