番外篇:图像梯度
了解图像梯度和边缘检测的相关概念。图片等可到文末引用处下载。
还记得前面平滑图像中提到的滤波与模糊的区别吗?我们说低通滤波器是模糊,高通滤波器是锐化,这节我们就来看看高通滤波器。
图像梯度
如果你还记得高数中用一阶导数来求极值的话,就很容易理解了:把图片想象成连续函数,因为边缘部分的像素值是与旁边像素明显有区别的,所以对图片局部求极值,就可以得到整幅图片的边缘信息了。不过图片是二维的离散函数,导数就变成了差分,这个差分就称为图像的梯度。
当然,大部分人应该是早忘记高数了( ̄ ▽  ̄)",所以看不懂的话,就把上面的解释划掉,我们重新从卷积的角度来看看。
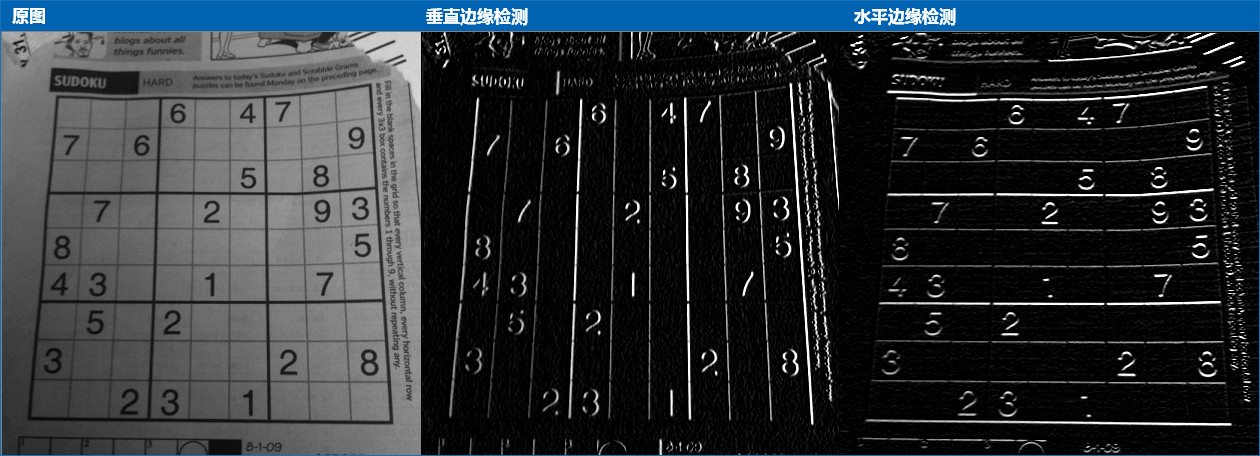
垂直边缘提取
滤波是应用卷积来实现的,卷积的关键就是卷积核,我们来考察下面这个卷积核:
这个核是用来提取图片中的垂直边缘的,怎么做到的呢?看下图:
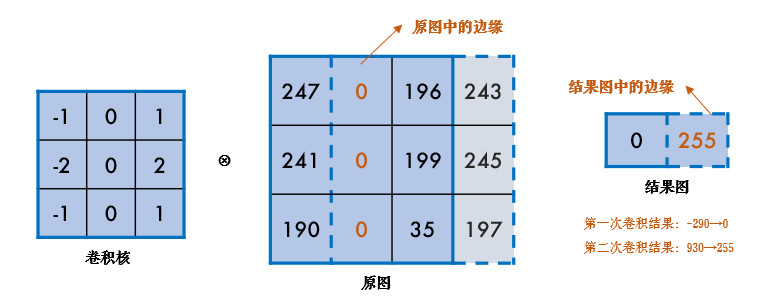
当前列左右两侧的元素进行差分,由于边缘的值明显小于(或大于)周边像素,所以边缘的差分结果会明显不同,这样就提取出了垂直边缘。同理,把上面那个矩阵转置一下,就是提取水平边缘。这种差分操作就称为图像的梯度计算:
还记得滤波函数
cv2.filter2D()吗?(番外篇:卷积基础)我们来手动实现上面的功能:
img = cv2.imread('sudoku.jpg', 0)
# 自己进行垂直边缘提取
kernel = np.array([[-1, 0, 1],
[-2, 0, 2],
[-1, 0, 1]], dtype=np.float32)
dst_v = cv2.filter2D(img, -1, kernel)
# 自己进行水平边缘提取
dst_h = cv2.filter2D(img, -1, kernel.T)
# 横向并排对比显示
cv2.imshow('edge', np.hstack((img, dst_v, dst_h)))
cv2.waitKey(0)
Sobel 算子
上面的这种差分方法就叫Sobel 算子,它先在垂直方向计算梯度,再在水平方向计算梯度,最后求出总梯度:
我们可以把前面的代码用 Sobel 算子更简单地实现:
sobelx = cv2.Sobel(img, -1, 1, 0, ksize=3) # 只计算 x 方向
sobely = cv2.Sobel(img, -1, 0, 1, ksize=3) # 只计算 y 方向
很多人疑问,Sobel 算子的卷积核这几个值是怎么来的呢?事实上,并没有规定,你可以用你自己的。
比如,最初只利用领域间的原始差值来检测边缘的Prewitt 算子:
还有比 Sobel 更好用的Scharr 算子,大家可以了解下:
这些算法都是一阶边缘检测的代表,网上也有算子之间的对比资料,有兴趣的可参考文末引用。
Laplacian 算子
高数中用一阶导数求极值,在这些极值的地方,二阶导数为 0,所以也可以通过求二阶导计算梯度:
一维的一阶和二阶差分公式分别为:
提取前面的系数,那么一维的 Laplacian 滤波核是:
而对于二维函数 f(x,y),两个方向的二阶差分分别是:
合在一起就是:
同样提取前面的系数,那么二维的 Laplacian 滤波核就是:
这就是 Laplacian 算子的图像卷积模板,有些资料中在此基础上考虑斜对角情况,将卷积核拓展为:
OpenCV 中直接使用cv2.Laplacian()函数:
laplacian = cv2.Laplacian(img, -1) # 使用 Laplacian 算子
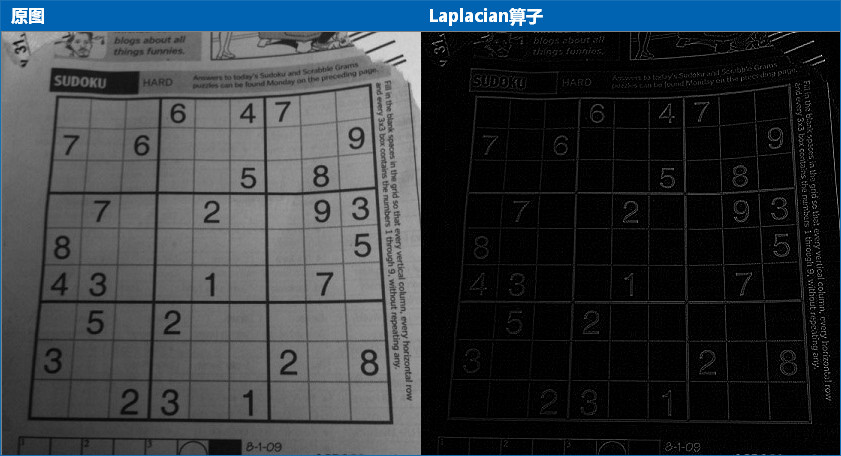
Laplacian 算子是二阶边缘检测的典型代表,一/二阶边缘检测各有优缺点,大家可自行了解。
练习
- (选做)同志们有空补补高数
姿势(知识)呗!(✿◕‿◕✿)